Schematic overview of my research world regarding free-space segmentation using stixel algorithms.
|
|
|
|
|
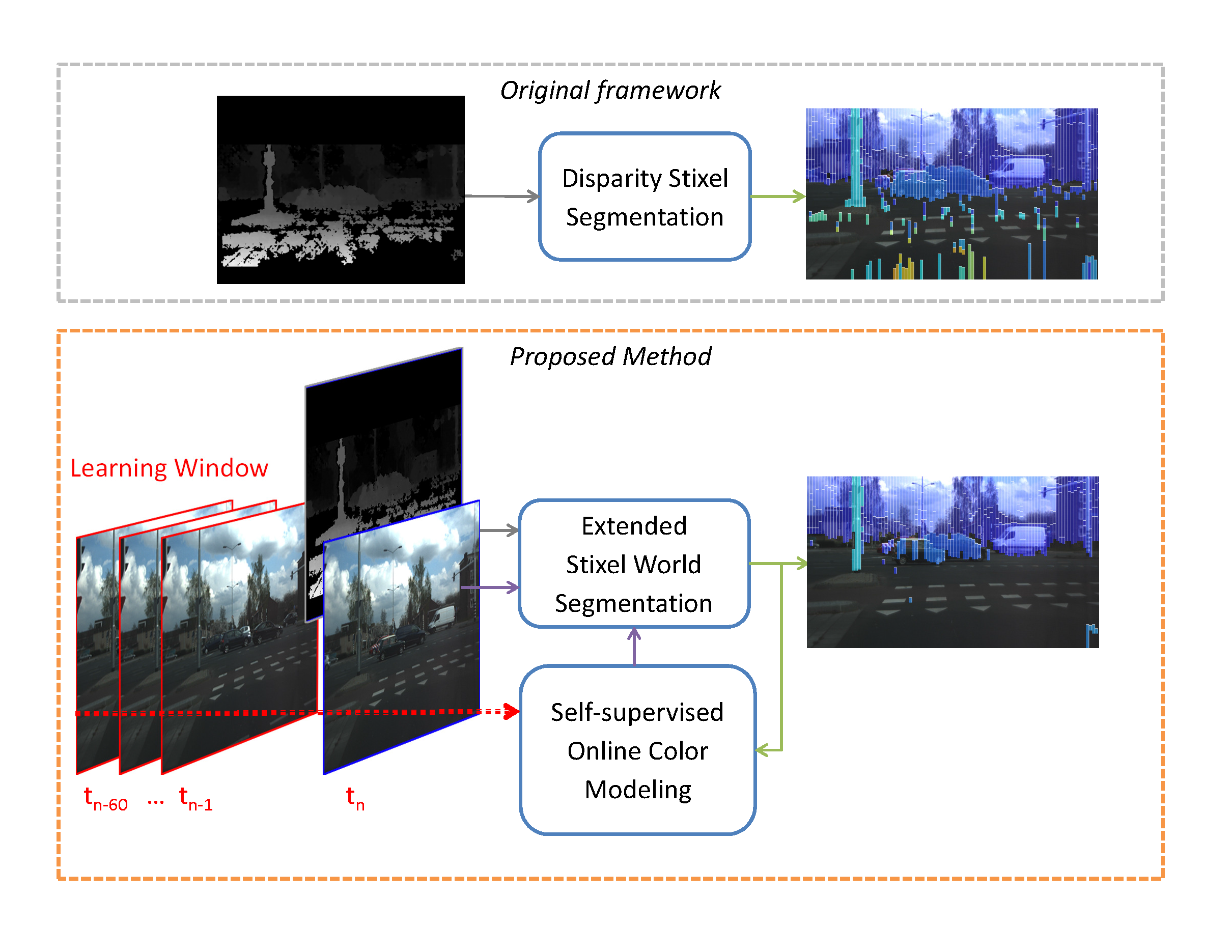
Step 1 (related paper: ITSC14) Fusing color with disparity in an Extended Stixel World to increase robustness against adverse imaging conditions. |
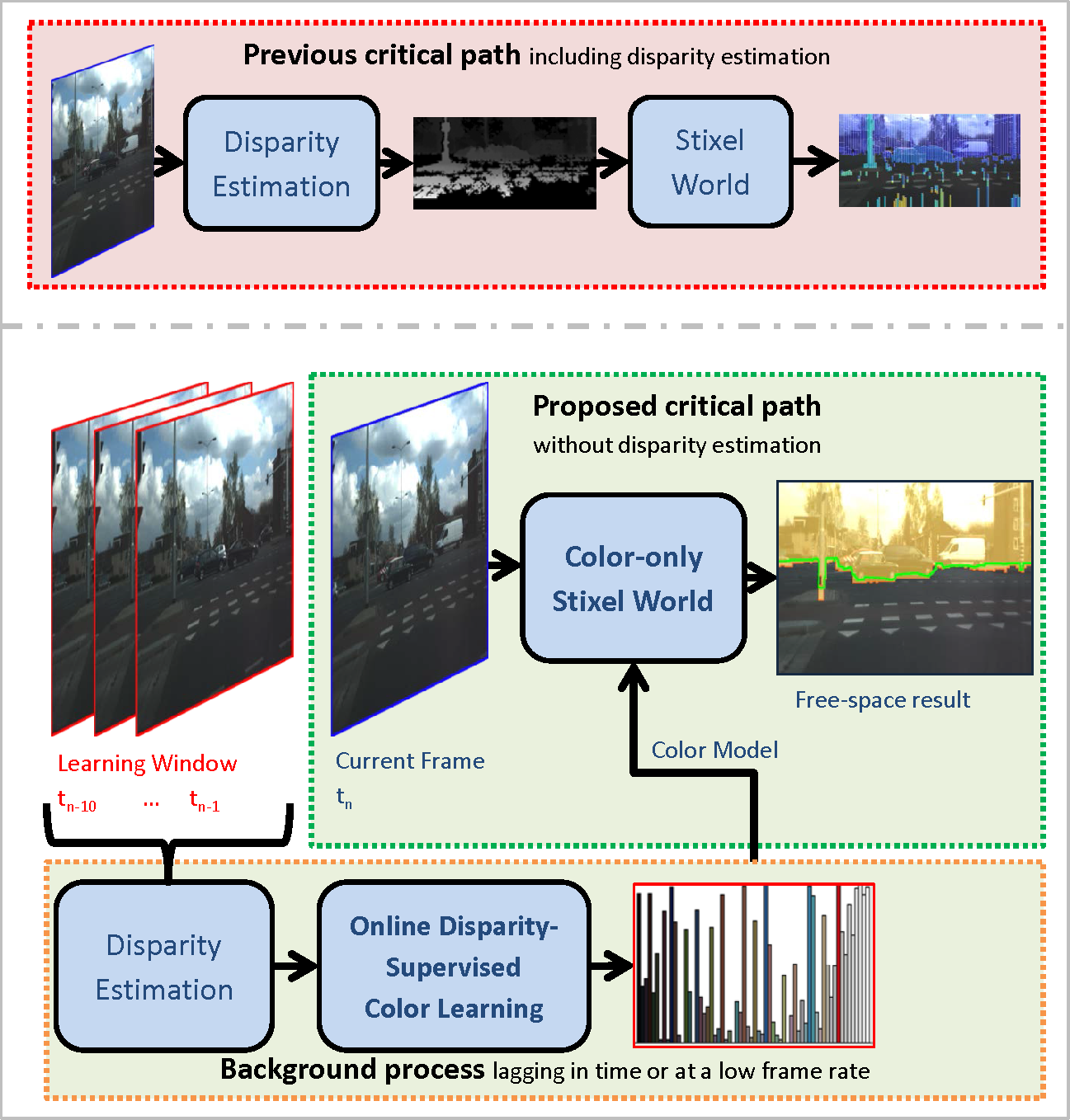
Step 2 (related papers: ITSC15 & PPNIV15) Taking disparity analysis out of the critical path without degrading segmentation quality to reduce system response time/latency. |
|
|
|
||
|
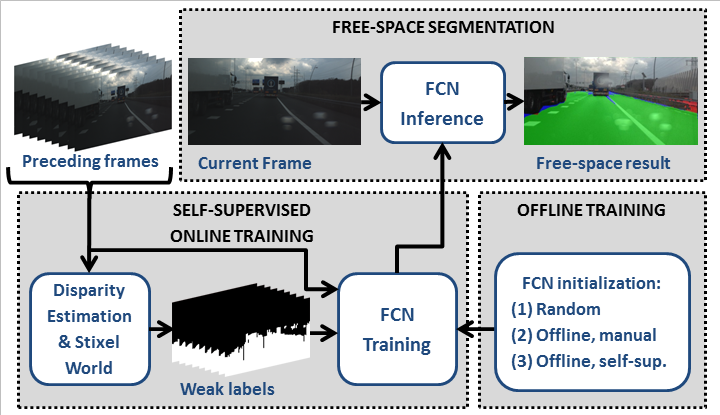
Step 3 (related paper: arXiv16 & EI-AVM17; view corresponding poster) Using the same strategy of online, self-supervised training as in step 2, but now rely on the rich encoding of Convolutional Neural Nets for a more advanced and specialized color modeling. We use a small net that is initialized with offline training and tuned online so that we achieve fast convergence. Additionally, we achieve fast inference by executing it as a Fully Convolutional Net, using the CN24 library. |